
Transatlantischer Dialog zur Robotik startet
30. Oktober 2019
„Norddeutsche Automotive Allianz“ gestartet
11. November 2019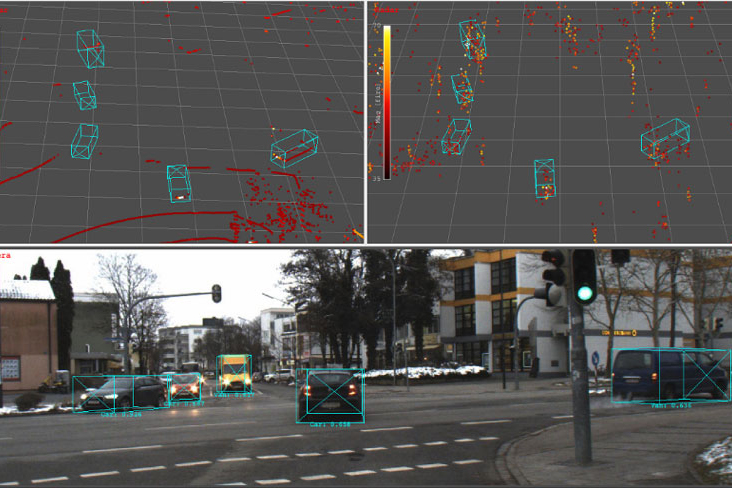
Automatisierte und vollautomatisierte Fahrzeuge müssen ihre Umgebung selbstständig erfassen und verstehen. Bei starkem Regen oder Schneefall sind Sensoren wie Kameras und Laser jedoch blind. Bei solchen Witterungsbedingungen funktionieren Radarsysteme erheblich besser und robuster.
In dem Forschungsvorhaben AuRoRaS – Automotive Robust Radar Sensing – sollen neue Simulationsverfahren und Methoden der Künstlichen Intelligenz entwickelt werden, um Radarsysteme effizienter und das autonome Fahren sicherer zu machen. Drei Partner aus Forschung und Technologie arbeiten im Rahmen des Förderprogramms KMU-innovativ des Bundesministeriums für Bildung und Forschung (BMBF) daran, die Messqualität von hochauflösenden Radarsensoren dahingehend zu verbessern.
Bessere Radarsensorik durch KI
In den nächsten beiden Jahren werden die Astyx GmbH (Projektkoordination), die BIT Technology Solutions GmbH und das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) ein automotive Radarsystem für den Einsatz beim hochautomatisierten (Level 4) und autonomen Fahren (Level 5) realisieren. Das Konsortium möchte damit die Qualität der Messdaten des sogenannten Dauerstrichradars signifikant erhöhen. Bei dieser Radartechnologie werden während der Messung ununterbrochen Radarsignale ausgestrahlt und die Reflektionen gemessen.
In der Automobilindustrie sind Radarsensoren bereits stark verbreitet. Der große Vorteil gegenüber kamerabasierten Verfahren oder Laser-Sensoren (Lidar) ist die direkte Messung der Objektgeschwindigkeit und die Robustheit vor Wettereinflüssen wie Nebel oder Schnee. Nachteile sind mögliche Fehler bei der Signalverarbeitung. Diese können durch Geschwindigkeitsmehrdeutigkeiten oder die sogenannte Mehrwegeausbreitung – beispielsweise aufgrund der reflektierenden Straßenoberfläche – entstehen,. Bei automatisierten oder autonomen Fahrfunktionen ist jedoch eine sehr hohe Genauigkeit und Robustheit zwingend erforderlich. Im Projekt sollen die physikalisch bedingten Nachteile von Radar-Sensoren durch innovative KI-Methoden erkannt und beseitigt werden.
Hochauflösende Radargeräte und Software-gestützte Objekterkennung
Die Astyx GmbH steuert neben ihren hochauflösenden Radargeräten auch das Spezialistenwissen in der Software-gestützten Objekterkennung bei. Dieses Know-how in den Bereichen 3D Objekterkennung aus Radarpunktwolken und Deep Learning-basierter Objekterkennung soll genutzt werden, um die KI-basierte Punktwolkenextraktion aus den Radar-Rohdaten zu verbessern. Außerdem entwickelt Astyx die synchronisierte Datenaufzeichnung, die geometrische Kalibrierung der Sensoren und die Entwicklung der Datenschnittstellen und Werkzeuge zum Annotieren der realen Trainings- und Testdaten.
Simulation der Radarsensordaten
Die BIT Technology Solutions GmbH entwickelt eine synthetische, physikalisch basierende Simulation der Radarsensordaten sowie die benötigten Referenzdaten (Ground Truth). Diese Simulationsumgebung dient als Basis für ein skalierbares und effizientes Training der KI und das qualitative Absichern der KI-Algorithmen. Das Konzept der BIT Technology Solution GmbH ermöglicht die Forschung im Bereich der Simulation des gesamten Spektrums elektromagnetischer Wellen und die anschließende Generierung entsprechender synthetischer Daten für Training und Validierung. Durch Kombination von simulierten und realen Radarmessdaten wird die Genauigkeit und Robustheit der KI-Methoden bei der Bereinigung der Messdaten und damit auch die darauf aufbauenden Umfelderkennung eines autonomen Fahrzeugs erheblich verbessert.
Merkmalsextraktion mit tiefen neuronalen Netzen
Der von Prof. Dr. Didier Stricker geleitete Forschungsbereich Erweiterte Realität am Deutschen Forschungszentrum für Künstliche Intelligenz (DFKI) in Kaiserslautern übernimmt aufgrund seiner Erfahrungen auf dem Gebiet des Maschinellen Lernens einen Großteil der Verbesserung der Datenqualität durch neu zu erforschende Signalverarbeitungsschritte mittels tiefer Neuronaler Netze. Diese Lernverfahren benötigen eine große repräsentative Datenbasis, die sonst nur sehr aufwendig und kostspielig mit Realdaten vollständig abgedeckt werden könnte. Der Effekt der Mehrwegeausbreitung bei der Radarmessung soll durch maschinelle Lernverfahren erkannt und kompensiert werden. Dabei werden die Messdaten des Radar-Sensors mithilfe von Neuronalen Netzen analysiert und falsche Werte anschließend entfernt.
Foto: Beispielhafte Darstellung der Fahrzeug-Umfelderfassung mittels Lidar (links oben), Radar (rechts oben) und Kamera (unten) Quelle: DFKI


{kind=link}
{kind=link}
{kind=link}